
随着自动化生产线在企业的普及应用,充分考虑到最大限度地解放劳动力,提高生产效率,改善加工品质。计划将原来由多人手工完成的焙烤薯片分拣装箱工作,由机器人替代,实现高效、柔性、清洁的自动化作业。
|
●产品:焙烤薯片 ●形状:椭圆、心形,表面有波纹。分拣时需识别薯片方位。 ●重量:约1.5g/片。 ●尺寸:直径大约45mm、厚度大约2~3mm。 ●产线生产效率:350Kg/h(折算为:3889片/min)。 ●来料输送线宽度:大约 1000mm。 |
 |
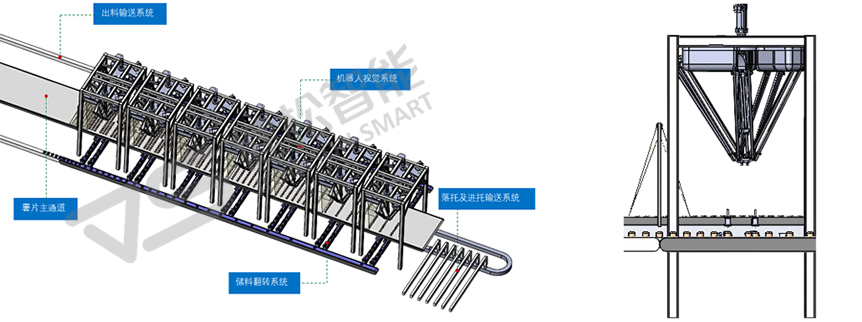
根据需求方提出的项目技术要求,结合现场生产状况和工艺要求,该方案计划在薯片出料输送带上方位置,依次并排放置14台Delta机器人( 3+1轴,工作范围1100mm),采用机器视觉准确定位、识别薯片,并配备储料翻转系统及出料输送系统,从而实现机器人高效、柔性自动化识别、分拣任务。
系统示意图
末端执行器
考虑到焙烤薯片的形状、材料以及装盒堆叠状况,计划:
采用先进的多层吸附末端执行器,可高效、便捷且方位一致地吸取多片薯片。(吸取薯片的大小、层数,视具体的生产工艺要求及系统调试情况而定。预计层数:21。)
●设计参数:末端执行器自重<0.5kg。
●吸取位置:焙烤薯片上表面的上方。
特点:多次吸取,一次性卸料装盒。并且,在吸取薯片的同时实现其堆叠。高效、便捷,充分发挥出机器人自动化工作效能。
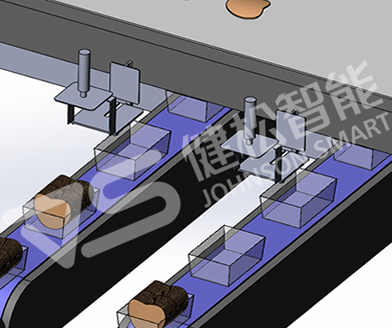
定位与检测
输送线上薯片的定位与检测,计划,采用机器视觉定位,无需人工干预,实现机器人系统自动精准识别需要抓取的工件方位。并且,每台机器人配备一套视觉,最大程度确保各机器人系统的稳定、高速作业。
●安装位置:各台机器人前方的输送带上方
特点:采用专利几何图案匹配技术,可在困难条件下定位元件,能适应旋转角度、比例和照明条件的变化
 |
落盒与储料翻转系统
底托落盒:
采用高速气动落盒机构,仅由人工负责加载空底托盒,其余过程无需人工干预,自动实现底托的高速落盒及各机器人工位的空盒分配工作。
储料翻转系统:
各机器人工位配备2组储料翻转系统并交替工作,从而确保机器人高速分拣工作的连续性。
动作原理及流程简介:
1)机器人放料完成后,由拨杆推送至翻转器中,同时侧板闭合。
2)翻转器执行90°翻转,堆叠薯片由垂直变为水平姿态。
3)侧板打开,同时压板下推,高速、稳定地将薯片推送至下方空托内。
实现“机器视觉+工业机器人”一体化全自动精准可靠定位抓放,无需人工干预或设定程式具有强大的柔性、可拓展性,能快速响应工厂后续产品、工艺的更新。多次吸取,一次性卸料装盒。并且,在吸取薯片的同时实现其堆叠。14台机器人联动稳定工作,能够保证整体的生产效能:350Kg/h。
Delta机器人应用
主要参数指标:
Delta类型,3+1自由度,有效负载(最大)1kg,额定工作范围Φ1100mm*250mm。预计稳定分拣薯片速度350片/min。(21片抓。以实际工况为准)
机器人活动范围安全保护设置,具有实时监控、安全防错报警等功能
特点:
delta机器人广泛应用于高速抓放和码垛包装加工。有受力平衡、结构简洁、动作快速、静音、低能耗和低维护等特点。
视频欣赏:
